
Преобразователь частоты выполняет функцию регулировки параметров и деталей двигателя. Достигается контроль путем подачи напряжения разной частотности. Чаще применяется в работе асинхронного двигателя. Благодаря прибору расширена область применения этого типа моторов. Инверторы, способные отладить их скорость вращения, открыли новые области применения на практике электродвигателей производственных линий, промышленной техники, насосных станций и других областей.
Применение частотного преобразователя необходимо там, где требуется регулирование числа оборотов и плавный запуск хода двигателя. Он также дает возможность плавного торможения, коррекцию нагрузки на электросеть при пуске в меньшую сторону. Благодаря преобразователям частоты число оборотов при разных нагрузках остается стабильным даже для большого диапазона нагрузок. В статье подробно рассказано об устройстве и его сферах применения, добавлена пара полезных видеороликов по теме, а также вниманию читателю предложен интересный материал для скачивания.

Назначение и основные функции
Преобразователь частоты — электронное устройство для изменения частоты электрического тока и напряжения. Пределы изменений солидные. Частота может меняться от 1 Гц до 500 Гц. И это не максимум, а предел регулировки нормального частотника. Современные частотные инверторы делают на основе электроники, что позволяет точно поддерживать частоту и напряжение. При желании можно создать условия для плавного старта. Все это позволяет применять относительно недорогие электромоторы постоянного тока там, где раньше это было невозможно.
Принцип работы
Частотный преобразователь — это устройство, которое плавно изменяет частоту исходного напряжения. Есть устройства, работающие как от однофазной (220 В), так и от трехфазной сети (380 В). Предел изменения частоты — от 0,1 Гц до 500 Гц. Существуют преобразователи двух типов — индукционного и электронного. Индукционные имеют невысокий КПД, так что используются реже. Практически все современные частотные преобразователи — электроника с системой управления и контроля.
Как работает преобразователь частоты с электродвигателем? Известно, что вал асинхронного электрического двигателя с короткозамкнутым ротором вращается со скоростью, которая зависит от частоты питающего напряжения. Частота вращения ротора определяется по следующей формуле:
n = 60 * f / p
где n — частота вращения ротора; f — частота питающего напряжения, p — число пар полюсов статора. Как видите, зависимость прямая. Чем выше частота питающего напряжения, тем быстрее вращается ротор, чем меньше частота, тем медленнее вращение. Вот на этой зависимости и построено управление асинхронным двигателем при помощи преобразователя частоты, его плавный старт и останов. Осталось разобраться как частотный регулятор это делает.
Устройство прибора
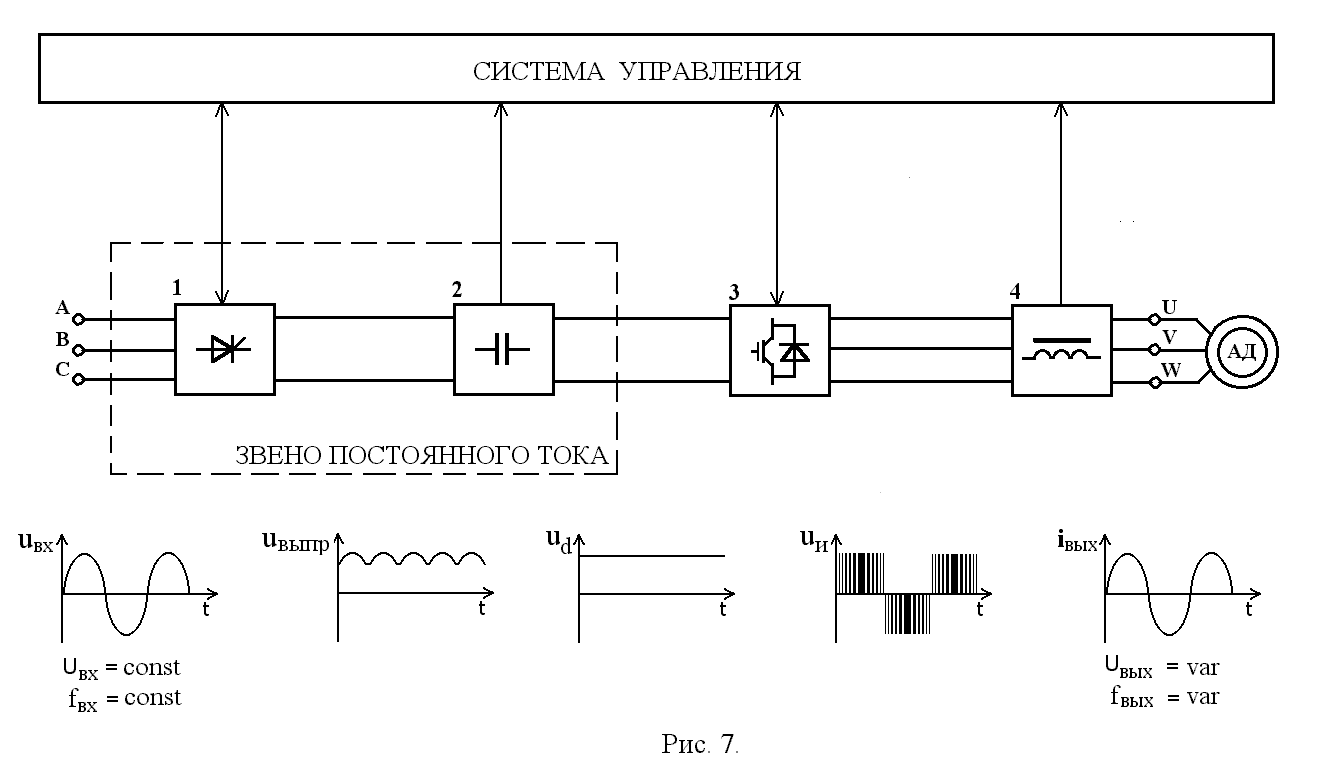
Работает частотный преобразователь для электродвигателя следующим образом:
- Сетевое напряжение подается на выпрямитель, где преобразуется в постоянное.
- На блоке инвертора из постоянного напряжения формируются полярные импульсы (положительные и отрицательные) требуемой частоты. Импульсы формируются по принципу широтно-импульсной модуляции (ШИМ).
- Импульсы преобразуются в синусоиду той же частоты.
Устройство не слишком сложное, но это базовый набор блоков. В более сложные модели встраиваются дополнительные, обеспечивающие контроль параметров и защиту.
Основной узел частотного преобразователя для электродвигателей — инвертор. Его собирают не основе IGBT транзисторов. Включая и выключая их, из постоянного напряжения формируем импульсы. Задавая частоту включения и выключения, на выходе получаем импульс с заданной частотой.
Если изменять скважность импульсов — отношение длительности периода к длительности импульса — меняется площадь импульса, а значит, и напряжение на выходе. Вот и получаем возможность используя частотный преобразователь для электродвигателя менять не только частоту, но и напряжение.
Последний блок — сглаживающий импульсы и превращающий их в синусоиду — присутствует далеко не всегда. Частота импульсов на выходе инверторного блока может достигать нескольких килогерц. А обмотки двигателя имеют высокую индуктивность, и сами работают как выходной фильтр.
Плюсы и минусы частотного преобразователя
В виду своих эксплуатационных качеств частотники все чаще применяются в различных технологических процессах. Каждый из них имеет свои особенности, которые зависят от их строения и принципа работы. Из достоинств этих устройств можно выделить:
- Невысокая стоимость. Относительно несложная конструкция делает их более доступными.
- КПД. Он является сравнительно высоким.
- Рекуперация. Частотный асинхронный преобразователь осуществляет как двигательную работу привода, и тормозную.
- Экономия. Например, частотный преобразователь для насоса может на 50% повысить экономичность его работы.
- Мощность. При добавлении преобразовательных комплектов, можно достичь любой мощности.
- Низкие частоты могут достигаться в широком диапазоне, при этом сохраняются стабильные двигательные вращения.
- Удобство. Конструкция в виде блоков и модулей делает возможным эксплуатацию устройства с небольшими затратами времени и труда.
Однако, есть и минусы:
- Выходной диапазон частот. ЧП работают только на понижение.
- Помехи. В напряжение, которое преобразуется появляются субгармоники, перекрывающие двигатель и создающие помехи.
- Структурная многоэлементность, по большей части результативна только для больших мощностей.
Область применения
Основные плюсы применения частотного преобразователя для электродвигателя — снижение влияния старта и торможения, возможность плавного регулирования скорости. Это дает возможность управлять работой двигателя без останова. Кроме этого, можно управлять группой двигателей, подключать движок на 220 В к сети 380 В и наоборот. Все это можно делать с асинхронными двигателями:
- Вентиляторы, швейные машины.
- Насосы, дымососы, компрессоры.
- Центрифуги.
- Крупная строительная техника (бетономешалки, манипуляторы и т.д.).
- Токарные или фрезерные станки.
Любой электрический двигатель при подключении через частотный преобразователь работает стабильно. Ведь большая часть устройств позволяет подобрать нужный режим питания для обеспечения нормальной работы.

Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты.
Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ. Преобразователь частоты – самое совершенное электронное устройство, через которое можно крутить асинхронный двигатель. Вот основные функции преобразователя частоты:
- Пуск/Стоп двигателя,
- Плавный разгон/замедление (торможение),
- Изменение рабочей скорости от 0 до 100% и выше номинала,
- Защита двигателя (их несколько – по току, температуре и др.),
- Реверс,
- Несколько вариантов управления (дискретное, аналоговое, по программе – от кнопок, реле, потенциометров, датчиков, контроллера, и т.д.).
Преобразователь частоты имеет несколько названий, которые используются на равных условиях:
- преобразователь частоты (ПЧ) – официальное название, его использует большинство производителей в своей документации,
- частотный преобразователь (ЧП),
- частотник – можно считать жаргоном, но в разговоре употребляется наиболее часто,
- инвертор,
- Inverter, Frequency Converter (FC), Variable Frequency Drive (VFD) – на английском.
Все эти названия могут использоваться в других сферах, поэтому иногда нужно уточнять. Что касается темы статьи, наша сфера – подключение преобразователя частоты для трехфазных асинхронных двигателей.
Станки
Применение частотного преобразователя в станках обеспечивает:
- регулирование вращательной скорости;
- поддержание регламентного количества оборотов;
- упрощение кинематической схемы устройств;
- повышение удобства эксплуатации;
- обеспечение надежной работы станочной техники.
Преобразователи частоты для электродвигателей используются как для оснащения станков и станочных линий, так и в качестве привода прокатных станков.
Электротранспорт
Начинаются плюсы применения частотного преобразователя с цены, но ей не ограничиваются. Устройство обеспечивает:
- экономию потребляемой энергии;
- безопасность работы (функция электрического торможения);
- эффективность расхода энергии (функция рекуперации – возврата ресурса в сеть питания при активации системы торможения).
Насосное оборудование
Плюсы частотного регулирования работы электродвигателя насоса:
- плавная смена числа оборотов (позволила отказаться от массивной ненадежной запорной арматуры);
- снижение гидравлических потерь при закачке;
- экономия электроэнергии;
- увеличение производительности при максимальных нагрузках на станции.
Вентиляция
В вентиляционном оборудовании преобразователь частоты обеспечивает снижение расхода воздуха. Большинство вентиляторов оснащаются схемами, которые дают максимально возможный расход, но далеко не все вентиляционные системы могут работать при этом максимуме. Потому здесь так важна функция привода – частотника. Хотя у него есть альтернатива (дросселирование при постоянной скорости вращения вала).
Виды приборов
Из всех типов и классов инверторов, применяемых для электродвигателей асинхронного типа, наибольшее распространение получили устройства, действующие по принципу ШИМ (PWM) контроллера. Регулирование при этом может осуществляться одним из 2 методов.
- Скалярный способ – упрощенный режим.
- Векторный метод – полный вариант, который позволяет работать в любых алгоритмах.
Техническим стандартом, по которому можно классифицировать современные преобразователи частоты (иначе, частотники или ПЧ, как их сокращенно называют) является метод управления, применяемый в этих устройствах при регулировании скорости вращения двигателя.
Скалярный метод основан на поддержании постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль, как видно из формулы, только за величиной питающего напряжения и его частотой.
При векторном методе управления ведется контроль не только за величиной и частотой, но и за фазой питающего напряжения. Иначе говоря, контролируется угол и величина так называемого пространственного вектора, который вращается с частотой поля двигателя.
Скалярное управление наиболее применимо в электроприводах небольшой сложности в силу относительной простоты и минимального набора требуемых для работы функциональных параметров. Подходит для применений, где требуется поддерживать постоянство (с ограниченным диапазоном и точностью, по сравнению с векторным) определенной технологической величины, и где отсутствуют большие динамические нагрузки.
Векторный метод управления относительно скалярного имеет бóльшую производительность, диапазон и точность регулирования, в том числе на малых оборотах двигателя, чем перекрывает практически все недостатки скалярного принципа управления.
Тот или иной метод управления выбирается в зависимости от требований, которые заданы для технологического процесса – это глубина и точность регулирования, необходимость управления моментом на валу двигателя, состояние привода при переходных процессах – при пуске/стопе, ускорении, торможении.
Скалярный метод управления
Скалярный метод управления применяют для приводов малой и средней мощности с вентиляторной нагрузкой (т.е. для вентиляторов, насосов, компрессоров, дымососов с легким, либо нормальным режимом работы). Что особенно важно, при использовании скалярного метода имеется возможность управления многодвигательными приводами от одного преобразователя частоты.
Жесткость статических характеристик привода практически приближена к естественной характеристике. Диапазон скалярного принципа управления, при котором возможно регулирование оборотов двигателя, без потери момента сопротивления не превышает 1:10. Благодаря этому достигается постоянная перегрузочная способность двигателя, которая не зависит от частоты приложенного напряжения, но на низких частотах может произойти перегрев двигателя и снижение развиваемого им момента. Для того чтобы этого избежать, производят установку ограничения минимального значения выходной частоты.
При необходимости увеличения жёсткости характеристики и расширения границ регулирования применяют различные аналоговые или импульсные датчики скорости. Для этого в преобразователях частоты имеются дискретно-аналоговые управляющие входы.
Преобразователи частоты, управление в которых реализовано на методе скалярного управления, как правило, невысокой стоимости, более простые и широко применимы в электроприводе, где отсутствуют критичные требования к точности и диапазону регулирования. При вводе в работу подобных преобразователей достаточно учитывать лишь номинальные величины параметров электропривода, осуществить настройку стандартных опций защиты и управления.
Применение скалярного метода управления для выполнения плавного пуска, торможения и регулирования скорости вращения привода насосов снижает интенсивность гидравлических ударов, что позволяет сократить количество профилактических ремонтов оборудования и вероятность аварийных ситуаций, связанных с механическими нагрузками (преждевременный износ муфт, редукторов, подшипников двигателей).
При увеличении скорости напряжения питания статора пропорционально увеличивается. Скалярное управление способствует удержанию постоянства момента на валу в рабочем диапазоне частот (но на невысоких скоростях момент снижается, для этого в преобразователях частоты есть возможность задания момента для нижней границы скорости).
Решение проблемы: если требуется поддерживать постоянный момент на валу, то для этой задачи лучше подойдут векторные преобразователи частоты. Также возможна установка датчиков момента, но это сильно повышает общую стоимость + нельзя одновременно регулировать и момент, и скорость.
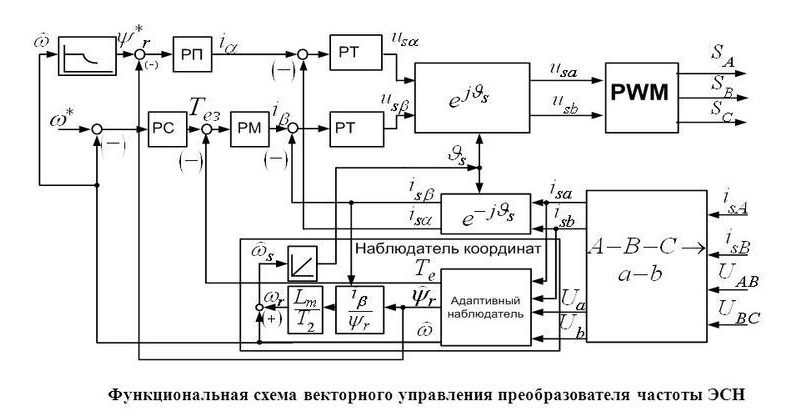
Векторный метод управления
Преобразователи с частотно-векторным управлением в основном применяют для электроприводов с тяжелым режимом работы (вентиляторы высокой мощности, подъемное, буровое оборудование, системы позиционирования). Векторный метод управления не только формирует гармонические токи и напряжения фаз (как при скалярном методе), но и позволяет производить регулирование магнитного потока электродвигателя. Таким образом, производится управление магнитным полем статора и ротора, регулируется их взаимодействие между собой для оптимизации момента вращения на различных частотах. При этом, улучшается динамика электропривода за счет специального встроенного канала управления моментом нагрузки. Внутренняя обработка процессов регулирования в современных частотниках выполняется на базе мощного процессорного оборудования.
Векторной метод управления заключается в математическом представлении модели двигателя. Возможность такого решения основана на том, что проекция пространственного вектора тока статора на ось полюсов магнитного поля ротора (продольную ось) пропорциональна величине магнитного потока, а проекция на поперечную ось пропорциональна величине электромагнитного момента. Такой более прогрессивный метод позволяет независимо и почти безынерционно регулировать момент на валу и скорость вращения двигателя под нагрузкой.
Если требования к точности регулирования скорости допускают отклонение до 1,5%, а диапазон – менее 1:100, то может быть использована бездатчиковая система управления – управление по замкнутому кругу. При требовании точности регулировки скорости с отклонением менее 0,2% и диапазона 1:10000 применяется управление с датчиком скорости на валу. Такие системы называются системами управления двигателем с обратной связью по скорости и позволяют регулировать момент на малых частотах (до 1 Гц).
- повышенная точность и широкий диапазон регулирования скорости
- плавное регулирование скорости вращения двигателя во всем диапазоне частот
- возможность удержания постоянства скорости при изменении нагрузки электропривода
- уменьшение потерь при переходных процессах в приводе (в связи с этим увеличенный КПД двигателя)
- высокое значение крутящего момента двигателя на околонулевой скорости (при разгоне и торможении лифта);
- способность выдерживать большие перегрузки при работе привода;
- высокоточное регулирование скорости;
- специальные прикладные программы применения (уравновешивание нагрузки, быстрая остановка, компенсация момента инерции привода);
- дополнительные опции обеспечения безопасности в аварийных режимах управления (в том числе, функции аварийного завершения работы, функция перехода на резервный источник питания и т.д.);
- уменьшение механических нагрузок подъемной системы;
- снижение шума работы привода (благодаря высокой частоте коммутации ПЧ).
Несмотря на ряд весомых преимуществ стоит отметить, что вычислительная сложность при векторном методе управления высока, и при расчете оптимальных режимов работы привода необходимо учитывать большое количество параметров электропривода. Но там, где требуется обеспечивать широкий диапазон и точность регулирования, особенно, на низких частотах вращения, векторный преобразователь частоты будет незаменим.
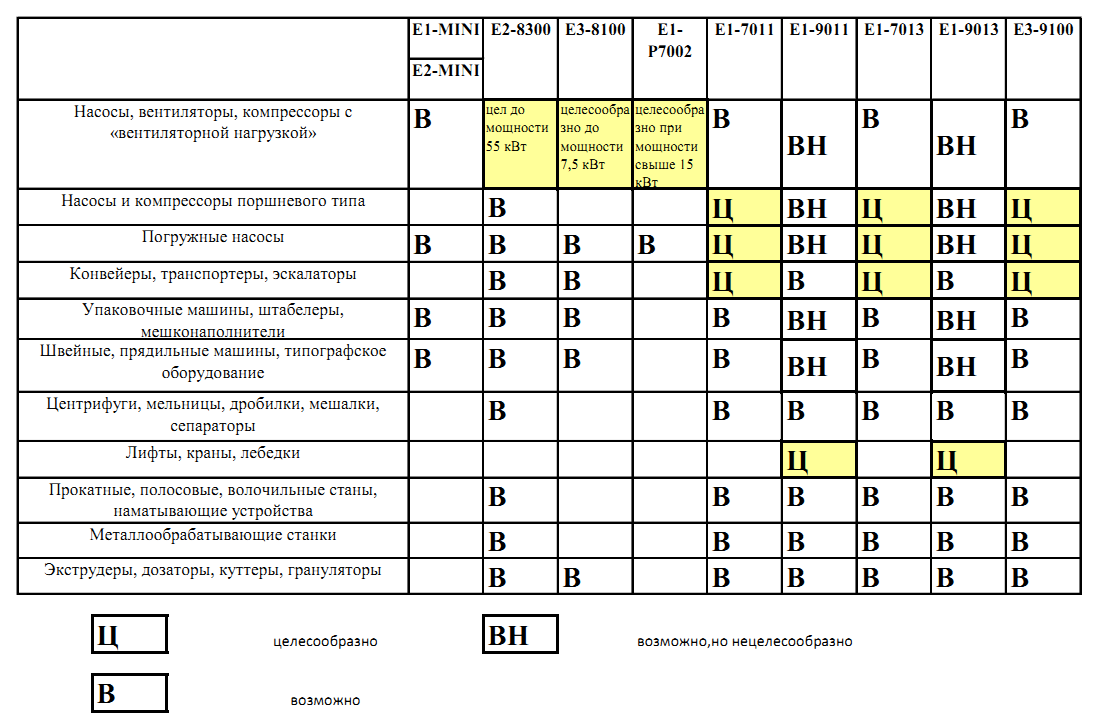
Классификация прибора
Выпускают разной мощности — от нескольких ватт до десятков киловатт. Преобразователь частоты может работать и с синхронными двигателями. Но выбирать его надо ориентируясь на потребляемый ток. Как правило, мощность ПЧ получается завышенной, но с этим ничего не поделаешь. Иначе работать двигатель не будет. И стоит иметь в виду, что синхронный двигатель при работе на повышенных частотах (выше 50 Гц) будет сильно шуметь, быстрее изнашиваться. Все частотные преобразователи для электромоторов условно можно разделить на несколько групп:
- Индивидуальные. Разработаны под какой-то определенный тип и характеристики мотора.
- Универсальные. Благодаря возможности изменять параметры могут работать с различными двигателями.
- Специализированные. Разрабатываются для конкретных типов оборудования. Например, преобразователи для насосных станций (насосов) и вентиляторов (Mitsubishi FR-F740).
- Интеллектуальные. Имеют встроенный персональный компьютер, имеют функции самодиагностики. ПЧ сам следит за состоянием изнашиваемых частей и сообщает о необходимости из замены, когда ресурс подходит к концу.
Самые дешевые — индивидуальные. Но они могут работать только исключительно с моторами одного типа/мощности. Специализированные тоже имеют довольно ограниченный диапазон подключаемого оборудования. Универсальные, с этой точки зрения, хороши, но стоит они значительно дороже (сложнее схема и больше компонентов).
Выбирать надо под конкретное устройство. Но, все-таки, самые дорогие — интеллектуальные. Многие из них управляться могут при помощи сенсорной панели, а не набора регуляторов. Кроме того, большинство моделей имеет пульт дистанционного управления. Это удобно, так как частотный регулятор может быть установлен далеко. Обычно их ставят в шкафах или где-то на вводе. При наличии пульта ДУ можно регулировать работу, находясь возле двигателя и не бегая к шкафу.

С асинхронным электромотором
Асинхронные двигатели при включении потребляют в разы больше энергии чем при штатной работе. Пусковые токи могут быть в 6-8 раз выше рабочих. Такие мгновенные скачки просаживают сеть. Напряжение резко падает, потом также скачкообразно восстанавливается. При включении особо мощного движка, сетевые параметры изменяются настолько сильно, что воспринимаются чувствительной техникой как пропадание. В результате перезапускается компьютерная техника, моргают или совсем гаснут лампы, перегорают блоки питания у котлов отопления и т.д.
Раньше остроту проблемы снижали установкой конденсаторов, которые сглаживали скачки. Но конденсаторы требуются большой емкости — по 70 мкФ на каждый киловатт мощности, плюс такую же емкость необходимо подключать для нейтрализации пускового тока. Но даже в этом случае скачки были, как и перегрузки двигателя на старте. К тому же подключение через емкость «съедало» значительную часть мощности мотора. Для компенсации потери необходимо было покупать более мощные агрегаты, ставить более мощные пусковые конденсаторы. В общем, решение не лучшее, но другого по сути, не было. 
Преобразователи частоты выбирают по мощности подключаемого оборудования (должен быть запас не менее 20%) и по току (тоже с запасом). С появлением преобразователей частоты (ПЧ) проблема решается намного эффективнее. Основная функция этого оборудования — плавный и постепенный разгон двигателя с нуля до полной мощности. На протяжении определенного промежутка времени (может задаваться, а может быть фиксированной величиной), подаваемый на двигатель ток плавно изменяет свои параметры, выводя движок на рабочий режим. Никаких перегрузок, влияния на сети.
И конденсаторы не нужны, значит мощность двигателя может быть примерно на 40% меньше чем раньше (именно настолько она снижалась с конденсаторами). Точно так же, постепенно, происходит отключение. Электромотор постепенно замедляется, затем останавливается. В общем, частотный преобразователь для электродвигателя продлевает срок его эксплуатации, убирает проблему пусковых токов, стабилизирует параметры сети.
С синхронным двигателем
Синхронные электродвигатели постоянного тока имеют несложное устройство, после выхода на требуемую скорость работают стабильно. Недостатки — сложности с пуском и невозможность регулирования частоты вращения вала. Проблему пуска давно научились обходить — делают асинхронную пусковую обмотку, которой разгоняют до нужной частоты. А вот невозможность менять скорость очень сильно ограничивает область применения. Не так много устройств, в которых нет необходимости в разных скоростных режимах работы двигателя. Это вентсистемы, кулеры.
Если с синхронным электродвигателем использовать частотный преобразователь, проблема изменения скоростей решается на раз. Причем эта связка работает настолько удачно, что японцы уже выпустили новые электропоезда на такой тяге. Стало появляться и другое подобное оборудование. Причем не только тяговое — новые электроинструменты некоторые производители стали выпускать с такими моторами. Да, стоит такое оборудование дороже, но имеет хороший КПД, работает стабильно.
Выбор по мощности
Главный критерий выбора частотного преобразователя для электродвигателя — мощность. Частотник не должен быть менее мощным чем управляемый им двигатель. Мощнее быть может, слабее — нет. Но все не так просто, так как конкретное соотношение мощностей зависит от типа оборудования, к которому будет подключаться преобразователь. Частотный преобразователь для электродвигателя с двумя парами полюсов, должен иметь мощность:
- равную двигателю, если движок работает постоянно (транспортеры);
- не ниже 150% от мощности, если движок работает с перегрузкой;
- не менее 120% от мощности движка для центробежных насосов и вентиляторов;
- для управления моторами подъемной техники, может понадобиться двукратное превышение мощности.
При выборе стоит обратить внимание на описание ПЧ, так как производители часто нормируют нагрузки на постоянный и переменный момент. В некоторых есть отдельные линейки под работу с постоянным и переменным моментом. Например, частотные преобразователи Delta (Дельта).
Мощность и потребляемый ток — два основных критерия выбора. Кроме этого, необходимо отслеживать такие параметры:
- Номинальный длительный ток преобразователя частоты должен быть не меньше рабочего потребления тока управляемого оборудования.
- Если подключаться будет несколько двигателей, ток ПЧ должен быть не менее чем на 25% больше суммарно потребляемого подключенными устройствами.
Если надо обеспечить быстрый разгон устройств, лучше выбрать более мощный преобразователь — он быстрее справляется с задачей.

Современные модели
Во многих областях применяются асинхронные двигатели, работа которых характеризуется высокими показателями устойчивости и безопасности. Это особенно важно, так как любое устройство обладает своими индивидуальными характеристиками, зачем и нужны инверторы, которые обеспечивают оптимизацию параметров их питания. К новой линейке оборудования относятся:
- Emotron FDU 2.0 — преобразователь частоты последнего поколения, выпускаемый шведской компанией Emotron. Устройство работает в диапазоне от 0,75 до 1,6 кВт и рассчитано на разные группы напряжения: 3×380 B, 3×500 B, 3×690 B. В основном инвертор используется для насосного или вентиляционного оборудования.
- Emotron серии CDU/CDX — оборудование, предназначенное для контроля за работой лифта. Инверторы этой марки устанавливаются как на новые лифты, так и для модернизации старых конструкций. Монтируются в машинном отделении или непосредственно рядом с шахтой.
- «Лидер» — преобразователь частоты применяется для управления асинхронными двигателями в насосном, вентиляционном оборудовании, мельницах, дробилках, центрифугах и так далее. Устройство исключает присутствие динамических ударов во время запуска, что позволяет в 1,5—2 раза увеличить срок службы двигателя и приводного механизма.
- Easydrive серии Smart — инвертор, обладающий выходной мощностью от 1 Гц до 2 кГц. Отличается автоматическим определением параметров электродвигателя, когда механизм неподвижен. Устройство обладает семью программируемыми входами переключения, которые позволяют выполнять до 30 функций.
Все модели позволяют менять направление вращения вала электродвигателя, экономить основные энергетические ресурсы, снижать эксплуатационные затраты.
Подключение к электродвигателю
Для обеспечения безопасной работы, перед частотным преобразователем желательно ставить автомат защиты. Причем на трехфазную сеть нужен трехфазный автомат, а не три отдельных однофазных. Это позволит быстро отключить сразу все фазы как при перегрузке проводки, так и при перекосе на одной из фаз. Номинал автоматов выбирают по току нагрузки.
Подключение нулевого и заземляющего проводников обязательно. Тянут их от соответствующих шин напрямую — при помощи провода требуемого сечения. Для защиты человека и контроля за состоянием изоляции, в схему желательно добавить еще УЗО (устройство защитного отключения). Его включают перед автоматом. При возникновении тока утечки, УЗО одновременно разорвет фазы и ноль, полностью обесточив схему.
Стоит узнать: Что такое асинхронный трехфазный электродвигатель.
Схема разрабатывается в зависимости от назначения устройства с которым работает электродвигатель. При покупке дешевых моделей преобразователей, для пуска и останова может понадобиться установка специального реле, фиксирующего контакты в нужном положении. В этом случае с выхода автомата провода подаются на реле, а с его выхода идут на частотный преобразователь. Само подключение двигателей к ПЧ происходит напрямую.
Как известно, асинхронные двигатели могут работать как с однофазным, так и с трехфазным напряжением. Перед подключением движка к преобразователю частоты, надо проверить как подключены обмотки. Они должны быть:
- «звездой» — если напряжение на выходе ПЧ трехфазное;
- «треугольником» — если преобразователь выдает однофазное питание.
Частотный преобразователь для электродвигателя подключается при помощи кабелей (не проводов), сечение и параметры которых соответствуют параметрам устройства. Эти данные, как и рекомендации по подключению, должны быть в паспорте прибора. Так что внимательно проштудируйте мануал. Это может спасти от многих неприятностей. Все-таки могут быть особенности.
Базовая схема включения
Простейшая схема включения преобразователя частоты выглядит как три фазы на входе, три фазы на выходе. На входе три фазы имеют, как правило, линейное напряжение 380 В с частотой 50 Гц. В зависимости от типа подключенного двигателя, линейное напряжение на выходе изменяется от 0 до 380 В, при этом выходная частота зависит от напряжения, и может меняться от 0 до 100 Гц и более (там уже не выдерживает механика).
Этот график – ключевой для понимания принципа работы преобразователя частоты и его настройки. Обратите внимание – на вольт-частотной характеристике приведены названия основных точек и номера параметров. Конечно, в таких делах очень много нюансов, но не буду вдаваться в подробности. Перед настройкой преобразователя частоты желательно вернуть его параметры к заводским настройкам (по умолчанию), особенно, если он где-то уже использовался.
| Таблица параметров ПЧ | |||||
| Номер | Название | Значение | Описание значения | ||
| 00,03 | Отображаемый на дисплее параметр при подаче питания | 1 | Фактическая выходная частота | ||
| 01,00 | Максимальная выходная частота Fmax | 60 Гц | Ограничение регулировки сверху | ||
| 01,01 | Частота максимального напряжения | 50 Гц | Номинальная частота двигателя | ||
| 01,08 | Нижний предел выходной частоты | 30 % | Ограничение частоты снизу (от Fmax=60Гц это 18Гц) | ||
| 02,08 | Скорость изменения частоты | 0,1 | Работа кнопок Больше/Меньше | ||
| 03,04 | Коэффициент усиления аналогового выхода | 103 % | Коррекция показаний вольтметра | ||
| 03,08 | Режим работы встроенного вентилятора | 3 | При нагреве ПЧ | ||
| 04,04 | Режим управления Пуск/Стоп | 2 | Трехпроводная схема без фиксации | ||
| 04,06 | Функция входа MI4 | 11 | Уменьшить выходную частоту | ||
| 04,07 | Функция входа MI5 | 10 | Увеличить выходную частоту | ||
| 06,01 | Токоограничение при разгоне | 100 % | Защита ПЧ | ||
| 06,02 | Токоограничение при работе | 90 % | Защита ПЧ | ||
| 06,03 | Защита от превышения момента (OL2) | 2 | Защита ПЧ | ||
| 06,04 | Уровень перегрузки OL2 | 100 % | Защита ПЧ | ||
| 06,06 | Тепловое реле защиты двигателя (OL1) | Режим для стандартного двигателя | |||
| 07,00 | Номинальный ток двигателя (1 кВт) | 2,2 | Для работы теплового реле 06,06 | ||
Такую таблицу настроек очень полезно иметь в документации к любому преобразователю частоты – это поможет в обслуживании, настройке и ремонте.
Схема со звеном постоянного тока и АИН
АИН имеет в качестве источника питания источник напряжения. Если АИН питается от управляемого выпрямителя (рис. 5.40), то на выходе устанавливается конденсатор большой емкости, тогда АИН имеет жесткую внешнюю характеристику, т. е. с изменением тока нагрузки напряжение не изменяется. При использовании АИН управляющими воздействиями на АД является частота и напряжение.
Управляемый выпрямитель УВ образуют тиристоры VS7–VS12. На выходе УВ фильтр L„ и С„, обеспечивающий вместе с диодами VD1– VD12 циркуляцию реактивной мощности. Тиристоры ИЯ – VS6 образуют управляемый инвертор для регулирования частоты. Конденсаторы С и индуктивности L вместе с диодами VDI-VD6 образуют цепи искусственной коммутации, обеспечивая закрытие основных тиристоров ИЯ–ИЙ в нужный момент. Для получения жестких статических и динамических характеристик электропривода с АИН применяются обратные связи по скорости, магнитному потоку или их сочетание. Широко применяется частотно-токовое управление АД. Для этого используется АИТ, позволяющий регулировать ток статора и частоту.
Функциональная схема подключения
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Крутим мотор-колесо коляски рукой, нажимаем кнопку «Пуск». Можно делать копии содержимого данной папки в родительской, переименовывать её и одноименные файлы с расширениями ewp, ewd, dep. Обычный инвертор тока промежуточной цепи изменяющегося напряжения.
Способ ограничения зависит от вида модуляции. А так же функцию обработки прерывания таймера и обработки прерывания таймера. Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками. Справа от моста изображены операционные усилители нормирующие сигналы датчиков тока.
Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть. Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Интересно почитать: устройство и схема подключения однофазного двигателя.
Правила подключения и настройки
Для полноценной и эффективной работы инвертора асинхронного электродвигателя его необходимо правильно подключить и настроить. В схему перед частотником устанавливается нужный автоматический выключатель. Если это трехфазная сеть, то выключатель должен быть рассчитан на напряжение 380 В, а сила тока соответствовать номиналу двигателя.
В случае аварийной ситуации в сети на одной фазе, отключены будут и остальные токоведущие проводники. Величина тока разрыва должна соответствовать значению в отдельной фазе электродвигателя. При использовании преобразователя частоты в однофазной сети устанавливается одиночный автоматический выключатель, по номиналу превышающий в три раза значение тока.
В обоих случаях автоматические выключатели не рекомендуется устанавливать в разрыв заземляющего или нулевого проводника, необходимо осуществлять только прямое подключение. Чтобы подключение было выполнено правильно, идущие от преобразователя токоведущие провода должны быть подключены к соответствующим клеммам двигателя.
Далее, инвертор подключается к контроллеру и блоку управления, который обычно поставляется в комплекте с преобразователем. Все подключения проводятся по схеме, входящей в руководство по эксплуатации оборудования. После выполнения крепежных работ включается автомат и на инвертор подается питание, о чем будет сигнализировать лампочка на пульте.
Для начала работы частотника включается кнопка запуска и осуществляется поворот соответствующей рукоятки. Электродвигатель медленно начнет вращаться. Если необходимо поменять вращение в обратную сторону, то для этого на пульте находится соответствующий тумблер. Чтобы добиться необходимого количества оборотов двигателя, устанавливается необходимая частота напряжения или вращения, в зависимости от модели оборудования.
КПД преобразователя
КПД преобразователя частоты — в качестве выходных ключей микросхем слаботочных импульсных регуляторов часто используются транзисторы Дарлингтона. В случае применения такой микросхемы КПД преобразования энергии можно улучшить с помощью всего двух недорогих компонентов.
Чтобы это было возможно, микросхема должна иметь отдельный вывод коллектора драйвера Q1 (Рисунок 1). При включении схемы диод D1 создает путь для коллекторного тока Q1. Затем D1 и С1 образуют вольто-добавочный выпрямитель, который увеличивает напряжение коллектора и ток Q1, уменьшая, таким образом, падение напряжения на замкнутом ключе Q2.
Еще одним преимуществом этой схемы является возможность работать с более низкими входными напряжениями, что обеспечивается повышенным напряжением на коллекторе драйвера. Емкость конденсатора С1 зависит от частоты переключения. Типичными являются значения от 47 нФ до 150 нФ.
[stextbox id=’info’]Для исключения глубокого насыщения Q2 или для ограничения коллекторного тока Q1 (в зависимости от входного напряжения и параметров G1), может потребоваться резистор R1. Во многих случаях этот резистор можно не устанавливать (то есть, R1 = ∞). Пример реализации описанной концепции на популярных микросхемах МС33063/ МС34063 показан на Рисунке 2.[/stextbox]
При входном напряжении VIN = 12 В и сопротивлении нагрузки 24 В КПД этой схемы составляет 85%, а минимальное входное напряжение равно 7.5 В. При тех же условиях стандартная схема без элементов С1, D1 и с соединенными выводами 1 и 8 имеет КПД 78% и минимальное входное напряжение 8.2 В. Этот подход применим и для случая инвертирующей конфигурации преобразователя.
Дополнительные функции и параметры
Современный частотный преобразователь для электродвигателя — сложное устройство. Если он выполнен на базе процессора, то функций имеет немало. Даже недорогие модели могут обладать широкой функциональностью. Для оправданного выбора стоит знать, что означает каждый из параметров и для чего нужна та или иная функция.
- Выходная частота или диапазон ее изменения. Тут все понятно. Этим параметром описываются возможности изменения частоты на выходе.
- Пределы регулирования напряжения. Вопросов тоже не возникает.
- Тип преобразования частоты. Может быть векторным и скалярным. Скалярный используется в более простых моделях. Параметры отслеживаются по соотношению напряжения и частоты. Векторный тип преобразования частоты в ЧМ подстраивает работу так, чтобы по отношению к нагрузке, момент вращения был постоянным. Такой способ управления более сложный и надежный, используется в более дорогих моделях.
- Наличие ПИД-регулятора. Удерживает давление, температуру и скорость в заданных пределах (выставляются при помощи ручки или программируются). Для связи с другими средствами управления должен иметь сигнальные выводы (аналоговые и/или цифровые).
- Юстировка скорости. Помогает при смене или скачках питания стабилизировать работу двигателя. Вид торможения. Обычно рекомендуют останавливать мотор на свободном выбеге — отключить питание и ждать пока остановится. Может применяться плавное торможение — постепенное снижение напряжения.
- Механическое торможение — когда скорость вращения вала тормозится за счет силы трения. Быстрее всего останавливается ротор при динамическом торможении. В этом случае на одну из фаз подается постоянное напряжение. Оно взаимодействует с ротором, останавливая его за короткий промежуток времени.
- Количество выходов с различными частотами. Такой частотный преобразователь для электромотора может обслуживать сразу несколько двигателей с различной (фиксированной) скоростью вращения.
Кроме параметров и дополнительных возможностей, на работу влияет качество сборки. Естественно, лучше брать оборудование известных производителей. Хорошо себя зарекомендовали ABB, Siemens, Mitsubishi, Omron. Но их частотники дешевыми назвать нельзя. Если нужно сэкономить и внешний вид не так важен, обратите внимание на отечественных и белорусских производителей. Внешнее оформление, как водится, желает быть лучше, а характеристики и стабильность работы неплохие.
Как выбрать прибор
Покупая частотный асинхронный преобразователь, нужно понять, с какими нагрузками он будет связан. Еще стоит учесть характеристики крутящего момента, диапазон скоростей, точность статической скорости, требования к начальному крутящему моменту и условия окружающей среды.
- Подходящий режим управления согласно характеристикам нагрузки. Производительность стала определяющим фактором. В дополнение к качеству изготовления, важным является и управление устройством.
- Защитная конструкция в соответствии со средой установки. Преобразователь частоты – это прибор, работающий с напряжением, поэтому важно учитывать температуру окружающей среды, влажность, пыль, pH, едкие газы и другие факторы.
- Характеристики крутящего момента нагрузки механического оборудования. Делятся на три типа: нагрузка с постоянным крутящим моментом, с постоянной мощностью и гидравлическая нагрузка.
Расчет экономического эффекта
В широких пределах регулируется скорость двигателей постоянного тока, но они редко используются из-за дороговизны изготовления и обслуживания. На сегодня, развитие электронных преобразователей сделало наиболее экономически эффективным способом регулирования частоты вращения ротора двигателя использование преобразователей частоты питающего напряжения (ПЧ). Особенно когда речь идёт о регулировании частоты вращения в уже существующей установке.
Наиболее очевидный экономический эффект при использовании преобразователей частоты может быть достигнут за счёт экономии электроэнергии. Но не стоит так же забывать о других факторах экономии: Плавный старт позволяет снизить механические пусковые нагрузки. Это прямой выход на уменьшение износа и увеличение срока службы оборудования:
- Плавный старт и останов насосов позволяет устранить гидроудары в системе;
- Более низкая частота вращения двигателя приводит к увеличению ресурса установки.
- Снижается шумность;
- Отсутствие 4-8 кратных пусковых токов при старте позволяет снизить установленную (максимальную) мощность, упростить систему защиты от перегрузок и короткого замыкания;
- Включение насоса в контур автоматического регулирования позволяет поддерживать заданные параметры давления расхода и др. без участия оператора или дистанционно;
- Точное поддержание давления в системе позволяет снизить максимальное давление в трубопроводах, а значит, и уменьшить вероятность их разрывов;
- Снижение давления даёт дополнительную экономию энергии и снижение потерь на утечки.
Все эти факторы сильно зависят от конкретной насосной или вентиляторной установки. Экономический эффект должен рассчитываться индивидуально для каждой установки. Замена электрических двигателей на новые, с более высоким КПД, может принести положительный экономический эффект. Даже при изменении КПД на 1-2% замена может окупиться за несколько лет. Особенно актуально проводить расчёты энергосбережения при установке новых двигателей.
Материал в тему: что такое асинхронный двигатель.
Наиболее точные расчёты производительности насоса и давления на выходе и потребляемой мощности можно получить используя характеристические кривые насоса. Однако не всегда они приводятся для разных скоростей вращения ротора. Обычно данные есть для одного или двух значений частоты вращения, но даже имея графики для одной частоты вращения ротора можно пересчитать их для других скоростей вращения.
Во-первых, нужно по необходимой производительности насоса и давлению на выходе определить по графикам насколько далека рабочая точка от точки максимального КПД. Если входные параметры меняются во времени, нужно сделать несколько оценок. Если рабочая точка всегда находится вблизи точки с максимальным КПД (снижение КПД менее 10%), частотное регулирование не даст экономии электроэнергии.
В случае если и другие факторы экономии окажутся незначительными, применение ПЧ принесёт убыток от затрат на приобретение и эксплуатацию. Но чаще всего параметры производительности рассчитаны с запасом от максимального расхода в системе, а максимальный расход достигается в течение одного-двух часов в сутки.
Если посмотреть по характеристическим кривым, то КПД насоса может падать до 20-30% от максимального. Давление на выходе центробежного насоса или не регулируется вообще или поддерживается с помощью рециркуляции (часть жидкости сбрасывается обратно) или дросселированием (поток регулируется регулируемой заслонкой). В зависимости от способа регулирования рабочая точка насоса по-разному смещается по семейству характеристических кривых.
Самые неудачные варианты это отсутствие регулирования и рециркуляция, они приводят к максимальному расходу энергии и повышенному давлению в системе. При дросселировании удаётся несколько снизить потребляемую мощность в случае снижения производительности.
Заключение
Средний срок окупаемости инвестиции в частотник электродвигателя – 18 месяцев. При этом срок службы марочных электроприводов для электродвигателей достигает 20–25 лет и более. Финансовая выгода подобного вложения очевидна: по прошествии полутора лет покупатель получает де-факто чистую прибыль от экономии электроэнергии и повышения эффективности технологических линий на протяжении 20 и более лет.
Дополнительную информацию о предмете статьи можно узнать из файла «Преобразователи частоты». А также в нашей группе ВК публикуются интересные материалы, с которыми вы можете познакомиться первыми. Для этого приглашаем читателей подписаться и вступить в группу. В завершение хочу выразить благодарность источникам, откуда почерпнут материал для подготовки статьи:
www.reductor58.ru
www.elektroznatok.ru
www.samelectric.ru
www.rusautomation.ru
www.rusenergetics.ru
www.studme.org
www.tokzamer.ru
www.usilitelstabo.ru
www.gekoms.com
Следующая
")
