
Сегодня речь пойдет от такой разновидности электродвигателях, как шаговые. Мы подготовили объемный материал, в котором подробно расписаны технические характеристики, устройство и сам принцип работы шаговых двигателей. В конце статьи вас ждет подробное руководство по изготовлению драйвера шд собственными руками, ну и как бонус список подробной литературы по теме. Любые вопросы, как всегда, вы можете задать в комментариях.
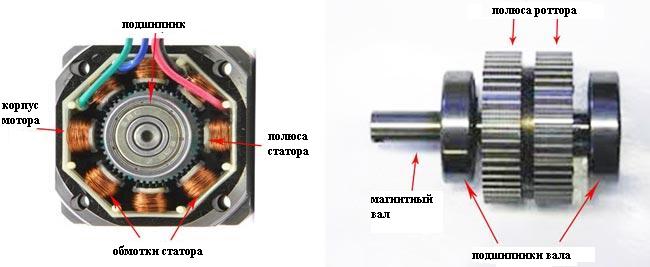
Устройство и принцип работы
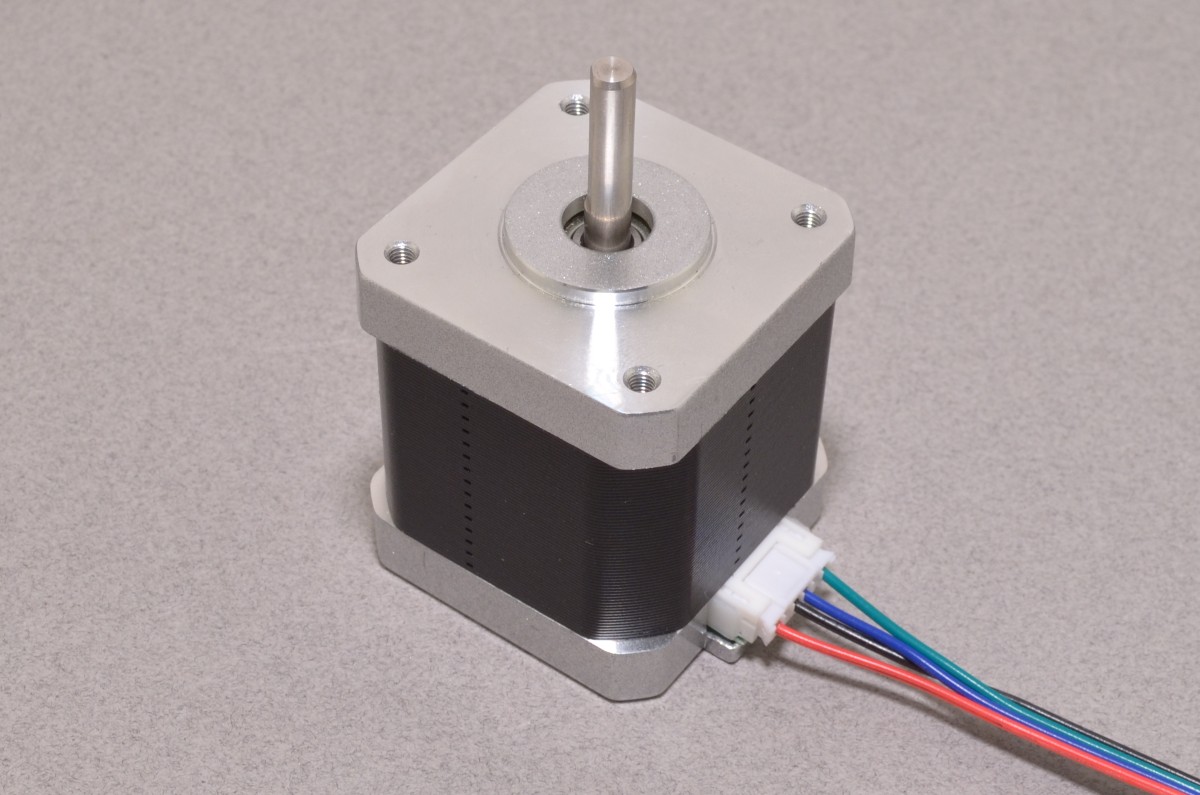
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах.
Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма.
Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель?
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Характеристики
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Приведу расшифровку основных технических параметров, которые используются на практике:
- Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
- Угол полного шага. Представление в другом виде предыдущего параметра. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Для двигателей серии FL57 составляет 1,8 ° и 0,9°.
- Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для этого тока указаны механические параметры двигателя.
- Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
- Сопротивление обмотки фазы. Сопротивление обмотки двигателя на постоянном токе. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
- Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. От него зависит скорость нарастания тока в обмотке. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.
- Крутящий момент. Основной механический параметр. Показывает максимальный крутящий момент, который способен создать двигатель. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
- Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Чем этот параметр меньше, тем двигатель быстрее разгоняется.
- Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
- Стопорный момент. Момент, необходимый чтобы провернуть вал двигателя при отсутствующем напряжении питания.
- Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
- Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Параметр из раздела электробезопасности.
Типы шаговых двигателей
Основные виды шаговых двигателей:
• с переменным магнитным сопротивлением
• с постоянными магнитами
• гибридные.
Шаговые двигатели с переменным магнитным сопротивлением
У двигателей с переменным магнитным сопротивлением в роторе нет постоянных магнитов. Их ротор выполнен из магнитомягкого материала и имеет зубчатую форму. Магнитный поток замыкается через ближайшие к полюсам статора зубцы.
Зубцы притягиваются к полюсам. Этим и обеспечивается вращение. При тех же размерах, двигатели с переменным магнитным сопротивлением имеют меньший крутящий момент, чем другие типы шаговых двигателей. Применяются они довольно редко.
Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты. Общий принцип действия шагового двигателя идентичен двигателям с постоянным магнитом. Только в реальных двигателях магнитов больше. Вот пример двигателя с тремя парами полюсов ротора. У реальных двигателей с постоянными магнитами число шагов на оборот доходит до 48, что соответствует углу шага 7,5 °.
Гибридные двигатели
Гибридные двигатели обеспечивают меньшую величину шага, больший момент и скорость. Число шагов на оборот для такого типа двигателей доходит до 400 (угол шага 0,9°). При этом они более сложные в изготовлении и более дорогие. Я не хочу забивать читателю голову конструкцией этих двигателей. У них есть и зубчатый ротор, и постоянные магниты.
По принципу действия гибридные двигатели эквивалентны двигателям с постоянными магнитами, но с гораздо большим числом полюсов. Это самый распространенный тип шаговых двигателей.
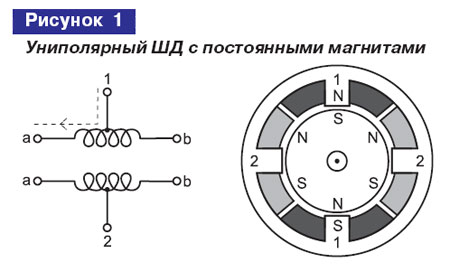
УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Униполярные шаговые двигатели, так же как и биполярные, имеют две обмотки, и каждая из них имеет центральный отвод. В зависимости от требуемого направления магнитного поля, в работу включается соответствующая половина обмотки, что достигается простым переключением ключей и существенно упрощает схему драйвера.
[stextbox id=’info’]Подобный механизм позволяет в качестве управляющей системы использовать простейший униполярный драйвер с четырьмя ключами.[/stextbox]
Униполярный двухфазный шаговый двигатель имеет шесть выводов. Но так же бывает, что средние отводы катушек внутри соединены, что позволяет шаговому двигателю иметь только пять выводов.
Благодаря простоте в эксплуатации, данные двигатели имеют широкую популярность среди как новичков любителей, так и во многих промышленных отраслях, поскольку униполярный шаговый двигатель является самым примитивным и дешевым способом получить высокоточные угловые движения.
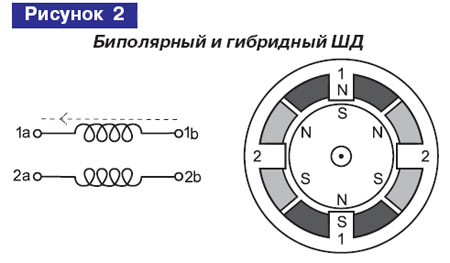
БИПОЛЯРНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
С биполярными шаговыми двигателями дело обстоит немного иначе. Данные двигатели имеют только одну обмотку в одной фазе. Управляющая схема биполярного двигателя должна быть намного сложнее, чтобы менять направление магнитного поля с целью изменить направление тока в обмотке. Этого можно достигнуть с помощью схемы H-bridge. К тому же, для упрощения задачи можно приобрести несколько драйверных чипов, которые вам помогут.
[stextbox id=’alert’]Биполярные шаговые двигатели, в отличие от униполярных имеют два вывода на одну фазу, ни один из которых не является общим. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.[/stextbox]
Униполярные шаговые двигатели, в отличие от биполярных, имеют два вывода за фазу, ни одна из которых не является общей. Иногда H-brigde сопровождают статические эффекты трения, что происходит с определенными приводными топологиями, однако это легко можно исправить, сгладив сигнал шагового двигателя на более высоких частотах.
ЛИНЕЙНЫЕ ШАГОВЫЕ СИНХРОННЫЕ ДВИГАТЕЛИ
С целью автоматизации некоторых производственных процессов на предприятии, иногда возникает необходимость перемещения объектов в плоскости. Чтобы это сделать, потребуется использовать специальный преобразователь вращательного движения в поступательное, что достигается путем применения кинематики.
При помощи линейных шаговых двигателей можно преобразовать импульсную команду прямо в линейное перемещение, что значительно упростит кинематическую схему всевозможных электрических приводов.
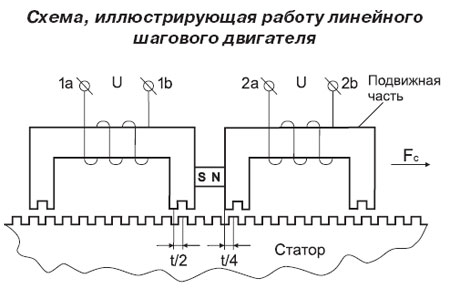
Статор в данном приводе представлен в виде магнитомягкой плиты, а провода подмагничиваются путем работы постоянного магнита.
Зубцовые деления в статоре и подвижной части одинаковые, при этом они могут быть сдвинуты на половину деления в пределах одного провода ротора. Поток подмагничивания и его магнитное сопротивление, в данном случае, не зависят от того, где находится подвижная часть двигателя.
Чтобы переместить объект в плоскости согласно двум координатам, применяют двигатели двухкоординатного типа.
Также в линейных двигателях используется магнитно-воздушная подвеска. Благодаря силе магнитного притяжения ротор притягивается к статору. Далее под ротор сквозь форсунки нагнетают воздух в сжатом виде, вследствие чего появляется сила, отталкивающая ротор от статора.
Так между ними возникает воздушная подушка и ротор висит над статором с наличием минимально зазора. Это и обеспечивает минимум сопротивления движения ротора и высокоточное позиционирование.
Подключение шаговых двигателей
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам.
В первом случае используется один центр-кран каждой обмотки и один конец провода.
Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу.
Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Типичные схемы подключения ШД
Схема подключения 6-ти выводного шагового двигателя к драйверу GeckoDrive (биполярное последовательное подключение обмоток)

Схема подключения 8-ми выводного ШД с биполярным параллельным соединением обмоток к драйверу GeckoDrive
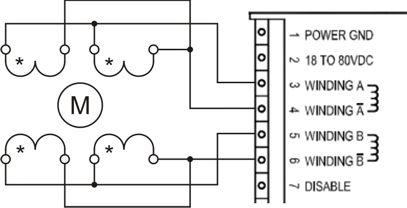
Схема подключения 8-ми выводного ШД с биполярным последовательным соединением обмоток к драйверу GeckoDrive

Управление шаговыми электродвигателями
Существуют три режима управления шаговым двигателем:
• полношаговый
• полушаговый
• микрошаговый.
Первый способ был описан в примерах выше. Это попеременная коммутация фаз, фазы не перекрываются, в каждый момент времени к источнику напряжения подключена только одна фаза.
Способ называется на английском one phase on full step – одна фаза на полный шаг. Точки равновесия ротора совпадают с полюсами статора. Недостатком этого режима является то, что в один и тот же момент используется половина обмоток для биполярного двигателя, и только четверть для униполярного.
Есть вариант полношагового режима управления при котором в одно и то же время включены две фазы. Называется two-phase-on full step – две фазы на полный шаг. При таком способе ротор фиксируется между полюсами статора за счет подачи питания на все обмотки.
Это позволяет увеличить крутящий момент двигателя на 40%. Угол шага не меняется, просто ротор в состоянии равновесия смещен на пол шага. Этот способ позволяет от двигателя получить в два раза больше шагов на оборот ротора.
Каждый второй шаг включается одна фаза, а между ними — включаются сразу две.
В результате такой коммутации угловое перемещение шага уменьшается в два раза, или в два раза увеличивается число шагов. Полный момент получить в полушаговом режиме не удается.
Не смотря на это, полушаговый режим используется часто. Уж очень простыми методами он удваивает число шагов двигателя.
Надо помнить, что для обоих режимов справедливо то, что при остановке двигателя со снятием напряжения со всех фаз, ротор двигателя находится в свободном состоянии и может смещаться от механических воздействий.
Чтобы зафиксировать положение ротора, необходимо формировать в обмотках двигателя ток удержания. Этот ток может быть значительно меньше номинального.
Способность шагового двигателя фиксировать свое положение при остановке позволяет обходиться без механических фиксаторов, тормозных систем и т.п.
Управление безколлекторными шд
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
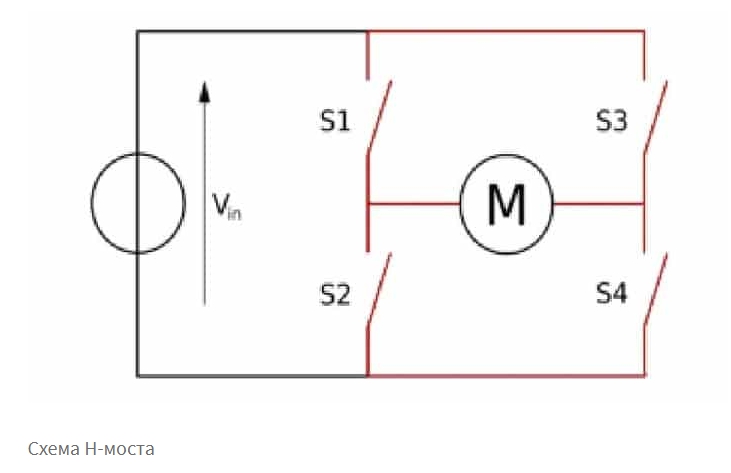
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора.
Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.

Контроллер управления шаговыми двигателями, сделанный своими руками
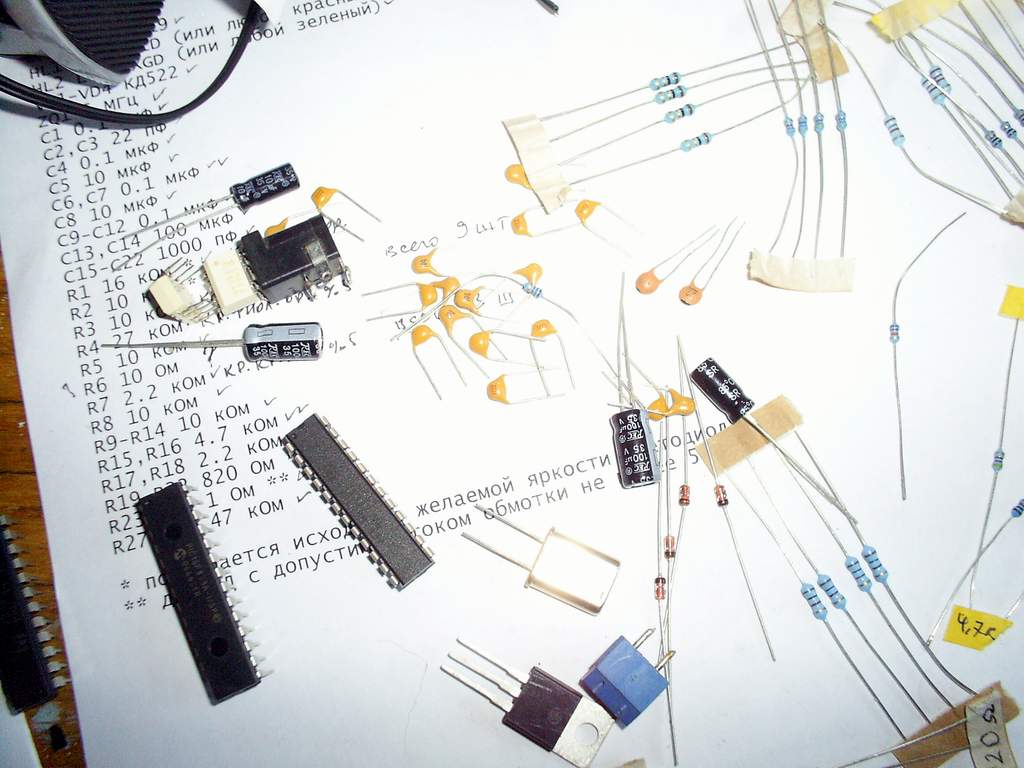
Задача проста: по готовой схеме и программе Павла Бахтинова с этого форума развести печатную плату, собрать и отладить контроллер управления шаговыми двигателями, установленными в монтировке астрономического телескопа. Далее, необходимо изготовить приличный корпус и пульт управления.
[stextbox id=’grey’]Все начинается с деталек (сразу вспоминается закон Мерфи: «Ни один талант не смог пережить страсти к деталькам» ):[/stextbox]
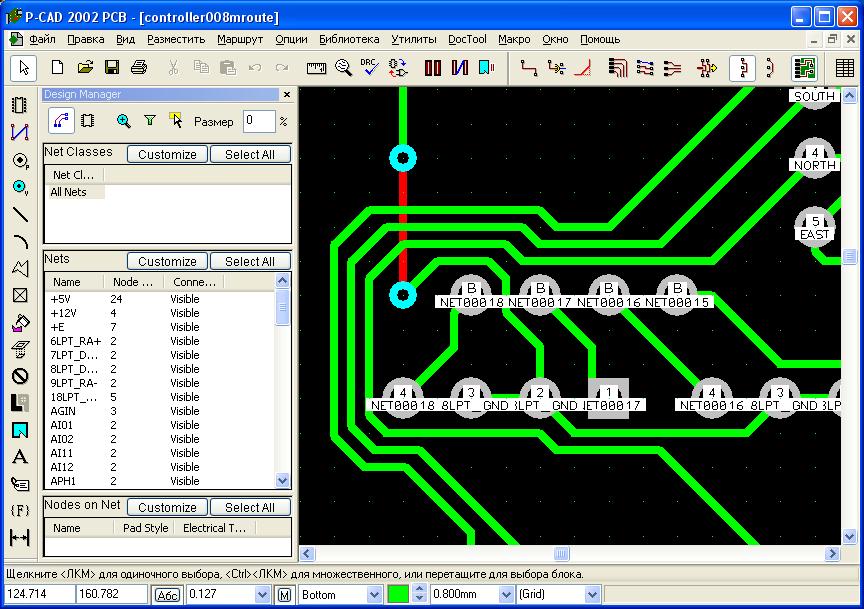
Работа над схемой:
Разводим печатную плату:
Фотошаблон готов:
Тут надо сказать несколько слов о моем НОУ-ХАУ в изготовлении фотошаблонов для перевода рисунка на печатную плату.
Обычно я их печатаю на принтере — чаще на струйном, реже на лазерном, т.к. термопленка давала непредсказуемую усадку после термообработки в лазернике (а шаблоны необходимы для двух сторон), поэтому невозможно было совместить два шаблона с достаточной точностью (до 0,15 мм).
Струйный принтер хорошо повторяет размеры, но не достаточно плотно заполняет черным цветом дорожки, кое-где они все же просвечиваются. Решение этой проблемы было вскоре найдено: печатаем не чистым черным, а чуть светлее в сторону желтого — принтер начинает добавлять к черной краске желтую (непрозрачную для УФ излучения) и дорожки, хотя и выглядят более прозрачными, после перевода фотоспособом получаются более плотные, практически без изьянов.
Главное — подобрать экспозицию:

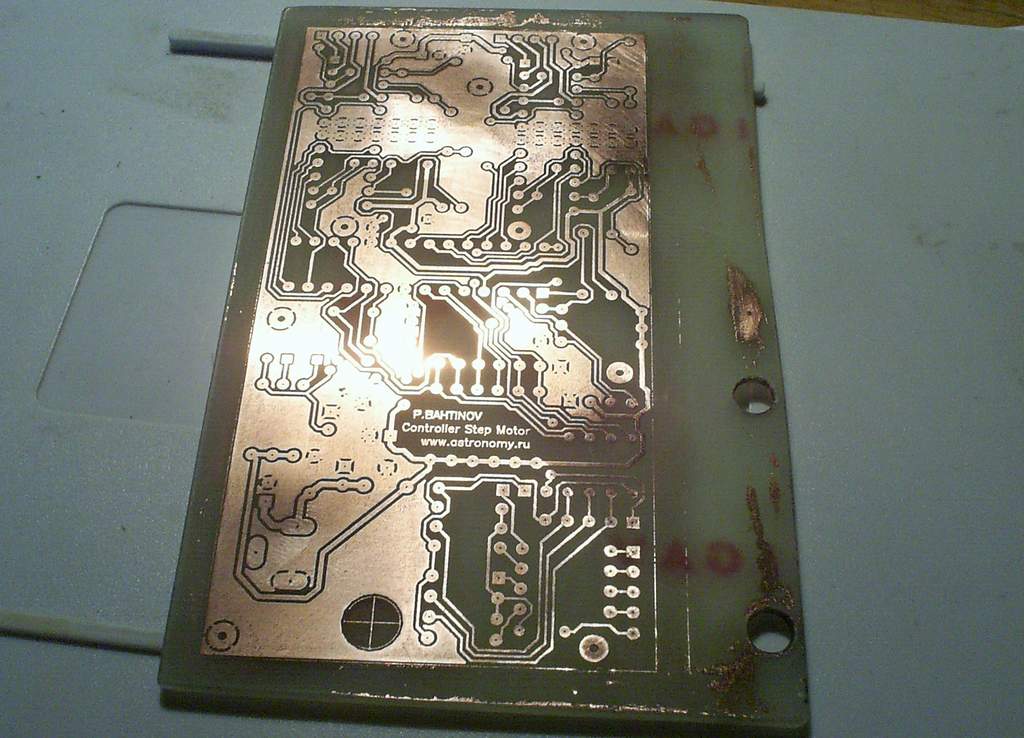
Идет процесс травления печатной платы:
Протравлена полностью:
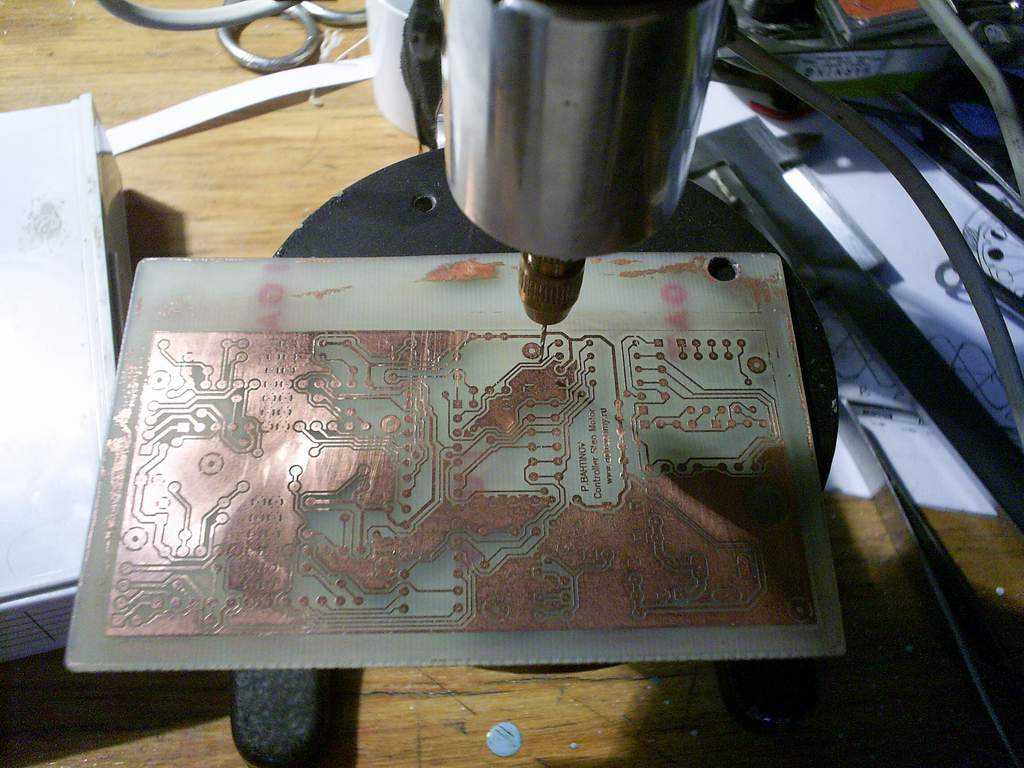
Сверлим отверстия диаметром от 0.7мм до 1.5мм самодельным сверлильным станком:
Паяльник старенький да удаленький:
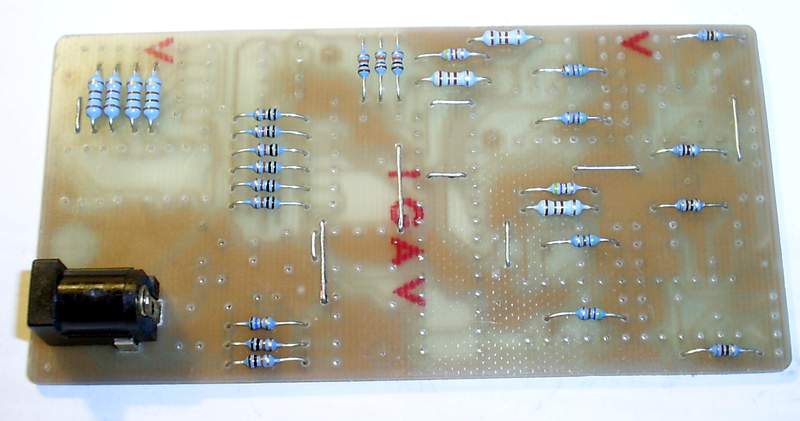
Забиваем плату деталями:
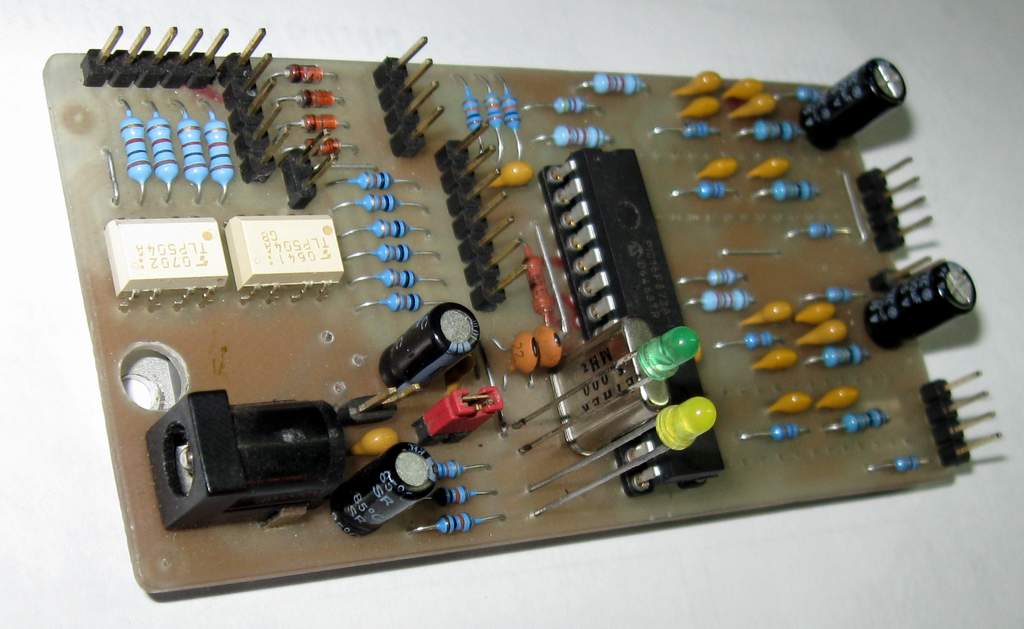
Все детали запаяны:

Обратная сторона платы, начался процесс отладки:
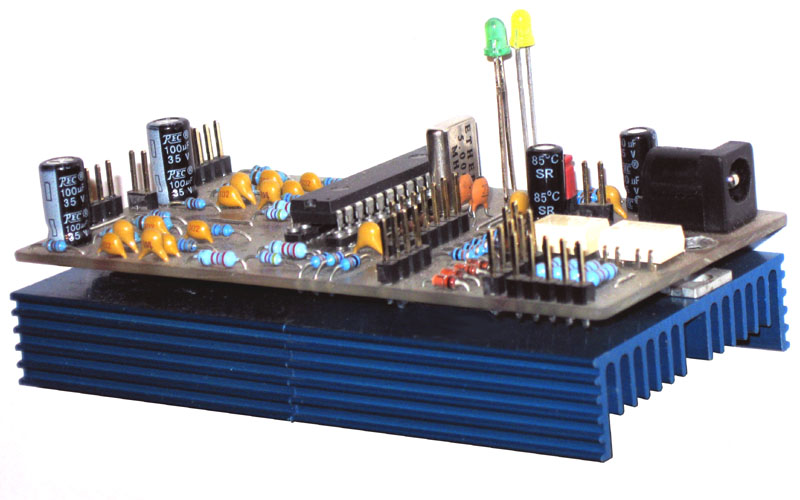
Вот так будем ставить нагревающиеся элементы (те, что выше на рисунке с этой стороны платы стоят — интегральный стабилизатор и две микросхемы — драйверы моторов) вот на такие красивые радиаторы:
В данное время началась работа над пультом. Главное в пульте управления, считаю — эргономика, насколько только это уместно применить к той коробочке, которая получится после сборки на отечественных БОЛЬШИХ, но надежных микрокнопках.
… И, так, после продолжительного перерыва снова продолжил работу над этим проектом.
Немного поигрался с разными вариантами дизайна пульта и, вот, к чему я пришел:

Недостатки и достоинства шаговых двигателей
Преимущества шаговых двигателей
• Точное позиционирование без обратной связи. Число импульсов определяет угол поворота.
• Двигатель обеспечивает полный крутящий момент при снижении скорости вращения, вплоть до остановки.
• Двигатель фиксирует свое положение при остановке за счет тока удержания.
• Регулировка скорости вращения с высокой точностью без обратной связи.
• Способность быстрого старта, остановки, реверса.
• Высокая надежность. Отсутствие коллекторных щеток. Недостатки шаговых двигателей.
• Сложная система управления.
• Невысокие скорости вращения.
• Возможно явление резонанса.
• Может произойти потеря позиционирования при механических перегрузках.
• Низкая удельная мощность.
Попробуем найти минусы
Как и всему на свете шаговому двигателю присущи определенные достоинства и недостатки.
Но есть области в точной механике, в которых он просто незаменим. Там где надо перемещать механические узлы, мгновенно останавливать, двигать назад, регулировать скорость… Попробуйте мгновенно остановить коллекторный двигатель, и вы забудете о недостатках шагового.
Попробуйте реализовать изменение скорости коллекторного двигателя в широких пределах. Проще поставить шаговый с его недостатками.
Заключение.
В завершении объемной статьи хочу выразить благодарность источникам, откуда мы черпали информацию:
http://robotosha.ru
http://chipok.ru
https://ru.wikipedia.org
Заключение
Если вам была полезна статья и вы желаете отблагодарить автора, то подпишитесь на нашу рассылку вк. Кстати, тех кто вступит ждет в подарок Энциклопедия начинающего электрика в PDF файле. Ну и будете получать статьи с нашего сайта самыми первыми. Без рекламы и спама, не потому что мы такие честные, а потому что модерация вк очень строгая.